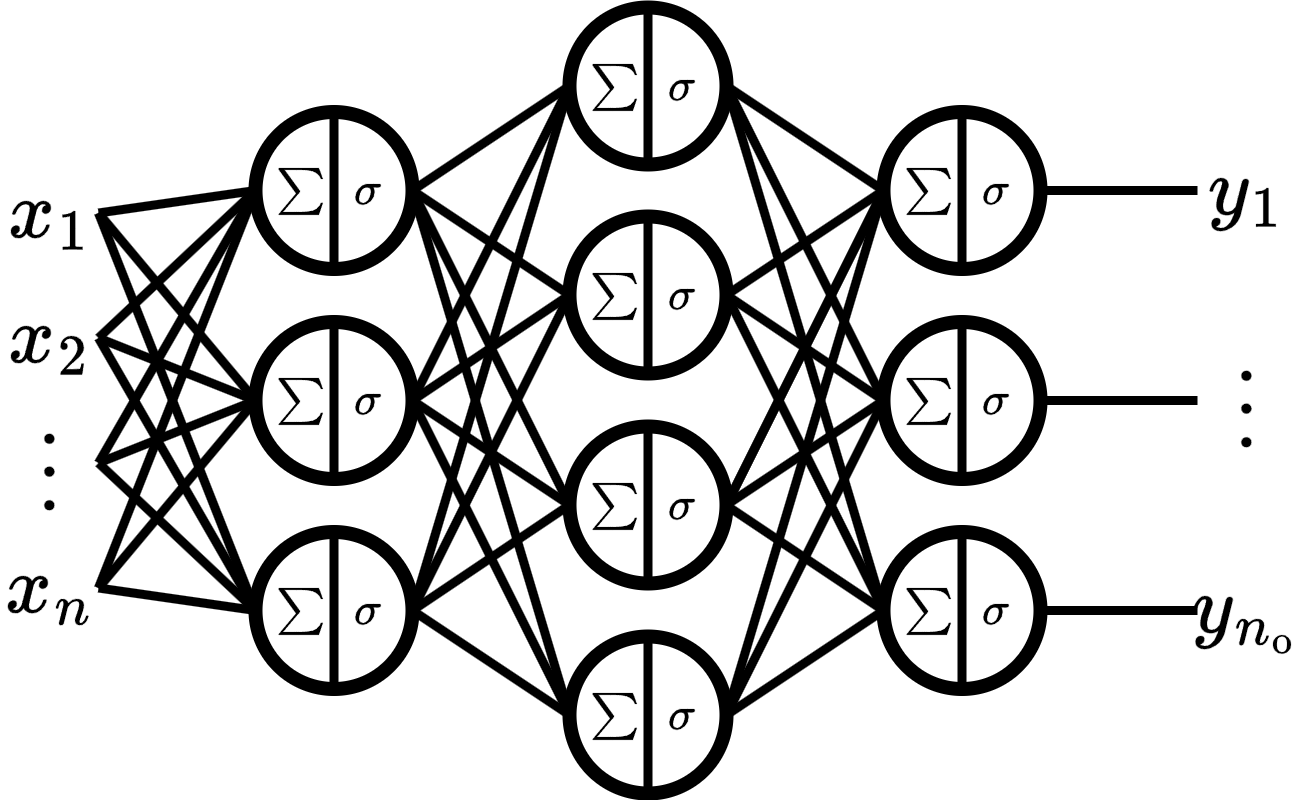
The first advance we will make towards deep learning will be the multilayer perceptron (MLP). It consists of interconnecting several dense layers and superimposing them to obtain a deep neural network (DNN).
Purpose of this Notebook:
The purposes of this notebook are:
Create a dataset for linear regression task
Create our own Layer classes from scratch
Dense
Activation functions
Create our own MLP class from scratch
Calculate the backpropagation from scratch
Train our MLP
Compare our MLP to the one prebuilt by PyTorch
import torch
from torch import nn
from platform import python_version
python_version(), torch.__version__('3.12.12', '2.9.0+cu128')device = 'cpu'
if torch.cuda.is_available():
device = 'cuda'
device'cpu'torch.set_default_dtype(torch.float64)def add_to_class(Class):
"""Register functions as methods in created class."""
def wrapper(obj):
setattr(Class, obj.__name__, obj)
return wrapperDataset¶
create dataset¶
from sklearn.datasets import make_regression
import random
M: int = 10_100 # number of samples
N: int = 6 # number of input features
NO: int = 3 # number of output features
X, Y = make_regression(
n_samples=M,
n_features=N,
n_targets=NO,
n_informative=N - 1,
bias=random.random(),
noise=1
)
print(X.shape)
print(Y.shape)(10100, 6)
(10100, 3)
split dataset into train and valid¶
X_train = torch.tensor(X[:1000], device=device)
X_valid = torch.tensor(X[1000:], device=device)
X_train.shape, X_valid.shape(torch.Size([1000, 6]), torch.Size([9100, 6]))Y_train = torch.tensor(Y[:1000], device=device)
Y_valid = torch.tensor(Y[1000:], device=device)
Y_train.shape, Y_valid.shape(torch.Size([1000, 3]), torch.Size([9100, 3]))delete raw dataset¶
del X
del YModel and layers¶
class Layer:
is_trainable: bool = False
pass
class Activation:
pass
class Losses:
passinitialization¶
scratch model¶
The model as such will be the container of all our layers.
class Model:
def __init__(self, layers: list[Layer], loss_f: Losses = None):
self.layers = layers[1:] # do not save the input layer
self.loss_f = MSE() if loss_f is None else loss_f
# initialize all parameters
out = layers[0].construct()
for layer in self.layers:
out = layer.construct(out)
def copy_parameters(self, parameters) -> None:
params = list(parameters())
for layer in self.layers:
if layer.is_trainable:
layer.set_params(params.pop(0), params.pop(0))layers¶
dense¶
dense or full conect layer.
for all . Where is the number of layers.
class Dense(Layer):
def __init__(self, units: int, act_f: Activation = None):
self.units = units
self.act_f = act_f if act_f is not None else Linear()
self.is_trainable = True
def set_params(self, w: torch.Tensor, b: torch.Tensor) -> None:
self.w.copy_(w.T.detach().clone())
self.b.copy_(b.detach().clone())
def construct(self, x: torch.Tensor) -> torch.Tensor:
"""
Initialize the parameters.
self.w := tensor (n_features, units).
self.b := tensor (units).
Args:
x: input tensor of shape (m_samples, n_features).
Return:
z: out tensor of shape (m_samples, units).
"""
n_features = x.shape[-1]
self.w = torch.randn(n_features, self.units, device=device)
self.b = torch.randn(self.units, device=device)
return self.forward(x)activation functions¶
For any activation function
for all .
class Linear(Activation):
pass
class RelU(Activation):
pass
class Sigmoid(Activation):
pass
class Tanh(Activation):
pass
class Softmax(Activation):
passforward propagation¶
model¶
@add_to_class(Model)
def predict(self, x: torch.Tensor) -> torch.Tensor:
"""
Forward propagation.
Args:
x: tensor of shape (m_samples, n_input_features).
Return:
y_pred: tensor of shape (m_samples, n_out_features).
"""
out = x
for layer in self.layers:
out = layer.forward(out)
return out
@add_to_class(Model)
def __forward__(self, x: torch.Tensor) -> torch.Tensor:
out = x
for layer in self.layers:
out = layer.__forward__(out)
return outlayers¶
dense¶
Weighted sum
@add_to_class(Dense)
def forward(self, x: torch.Tensor) -> torch.Tensor:
"""
Compute weighted sum Z = XW+b and activation function A = f(Z).
Args:
x: input tensor of shape (m_samples, n_features).
Return:
a: out tensor of shape (m_samples, units).
"""
return self.act_f(torch.matmul(x, self.w) + self.b)
@add_to_class(Dense)
def __forward__(self, x: torch.Tensor) -> torch.Tensor:
"""Forward propagation for training step."""
self.input = x.clone()
self.a = self.forward(x)
return self.aactivation functions¶
Linear¶
@add_to_class(Linear)
def __call__(self, z: torch.Tensor) -> torch.Tensor:
return zReLU¶
@add_to_class(RelU)
def __call__(self, z: torch.Tensor) -> torch.Tensor:
#return torch.relu(z)
return torch.max(z, torch.zeros_like(z))Sigmoid¶
@add_to_class(Sigmoid)
def __call__(self, z: torch.Tensor) -> torch.Tensor:
#return torch.sigmoid(z)
return 1 / (1 + torch.exp(-z))Tanh¶
@add_to_class(Tanh)
def __call__(self, z: torch.Tensor) -> torch.Tensor:
#return torch.tanh(z)
exp = torch.exp(-2 * z)
return (1 - exp) / (1 + exp)Softmax¶
@add_to_class(Softmax)
def __call__(self, z: torch.Tensor) -> torch.Tensor:
exp = torch.exp(z - torch.max(z, dim=1, keepdims=True)[0])
return exp / exp.sum(1, keepdims=True)input layer¶
The purpose of this layer is simply to create a random dataset to initialize all the parameters of the layers. This way we do not have to manually specify the dimensions of each parameter.
class InputLayer(Layer):
def __init__(self, n_input_features: int):
self.m = 10
self.n = n_input_features
def construct(self) -> torch.Tensor:
return torch.randn(self.m, self.n, device=device)evaluation¶
loss function¶
where is the activation of the last layer of the model and is the number of output features of the model.
class MSE(Losses):
def loss(self, y_pred: torch.Tensor, y_true: torch.Tensor) -> float:
return ((y_pred - y_true)**2).mean().item()
def __call__(self, y_pred: torch.Tensor, y_true: torch.Tensor) -> float:
return self.loss(y_pred, y_true)model¶
@add_to_class(Model)
def evaluate(self, x: torch.Tensor, y: torch.Tensor) -> float:
"""
Evaluate the model between input x and target y
Args:
x: tensor (m_samples, n_input_features).
y: target tensor (m_samples, n_out_features).
Return:
loss: error between y_pred and target y.
"""
y_pred = self.predict(x)
return self.loss_f(y_pred, y)backpropagation¶
We need to calculate the derivatives/gradients of each parameter in the model using backpropagation and update each parameter using gradient descent (gd).
The main idea of
where .
It seems like there are many different derivatives. However, many of them are the same. We only need to know 4 derivatives
With these 4 derivatives we can compute for all .
model¶
@add_to_class(Model)
def update(self, y_pred: torch.Tensor, y_true: torch.Tensor, lr: float) -> None:
delta = self.loss_f.backward(y_pred, y_true)
for layer in reversed(self.layers):
delta = layer.backward(delta, lr)loss function¶
@add_to_class(MSE)
def backward(self, y_pred: torch.Tensor, y_true: torch.Tensor) -> torch.Tensor:
return 2 * (y_pred - y_true) / y_true.numel()layers¶
activation functions¶
For more information about the derivatives of these activation functions, see gradients and activation functions.
Linear¶
@add_to_class(Linear)
def backward(self, delta, a):
return deltaReLU¶
@add_to_class(RelU)
def backward(self, delta, a):
return delta * (1 * (a > 0))Sigmoid¶
@add_to_class(Sigmoid)
def backward(self, delta, a):
return delta * (a * (1 - a))Tanh¶
@add_to_class(Tanh)
def backward(self, delta, a):
return delta * (1 - a**2)Softmax¶
@add_to_class(Softmax)
def backward(self, delta, a):
return a * (delta - (delta * a).sum(axis=1, keepdims=True))dense¶
respect to bias¶
where .
respect to weight¶
respect to input¶
gradient descent¶
@add_to_class(Dense)
def backward(self, delta, lr: float) -> torch.Tensor:
# activation function derivative
delta = self.act_f.backward(delta, self.a)
# bias der and update
self.b -= lr * torch.sum(delta, axis=0)
# weight derivative (update weight after compute input der)
w_der = torch.matmul(self.input.T, delta)
# input derivative
delta = torch.matmul(delta, self.w.T)
# weight update
self.w -= lr * w_der
return deltatrain¶
@add_to_class(Model)
def fit(self, x_train: torch.Tensor, y_train: torch.Tensor,
epochs: int, lr: float, batch_size: int,
x_valid: torch.Tensor, y_valid: torch.Tensor):
"""
Fit the model using gradient descent.
Args:
x_train: Input tensor of shape (n_samples, n_in_features).
y_train: Target tensor one hot of shape (n_samples, n_out_features).
epochs: Number of epochs to train.
lr: learning rate).
batch_size: Int number of batch.
x_valid: Input tensor of shape (n_valid_samples, n_in_features).
y_valid: Input tensor one hot of shape (n_valid_samples, n_out_features).
"""
for epoch in range(epochs):
loss_t = [] # train loss
for batch in range(0, len(y_train), batch_size):
end_batch = batch + batch_size
y_pred = self.__forward__(x_train[batch:end_batch])
loss_t.append(self.loss_f(y_pred, y_train[batch:end_batch]))
self.update(y_pred, Y_train[batch:end_batch], lr)
loss_t = sum(loss_t) / len(loss_t)
loss_v = self.evaluate(x_valid, y_valid) # valid loss
print('Epoch: {} - L: {:.4f} - L_v {:.4f}'.format(epoch, loss_t, loss_v))Torch Sequential¶
class TorchSequential(nn.Module):
def __init__(self, layers: list[nn.Module], loss_fn=None):
super(TorchSequential, self).__init__()
self.layers = nn.ModuleList(layers)
for layer in self.layers:
layer.to(device)
self.loss_fn = loss_fn if loss_fn is not None else nn.MSELoss()
self.eval()
def forward(self, x):
out = x.clone()
for l in self.layers:
out = l(out)
return out
def evaluate(self, x, y):
self.eval()
with torch.no_grad():
y_pred = self(x)
return self.loss_fn(y_pred, y).item()
def fit(self, x: torch.Tensor, y: torch.Tensor,
epochs: int, lr: float, batch_size: int,
x_valid: torch.Tensor, y_valid: torch.Tensor):
optimizer = torch.optim.SGD(self.parameters(), lr=lr, momentum=0.0)
for epoch in range(epochs):
loss_t = []
for batch in range(0, len(y), batch_size):
end_batch = batch + batch_size
optimizer.zero_grad()
y_pred = self(x[batch:end_batch])
loss = self.loss_fn(y_pred, y[batch:end_batch])
loss_t.append(loss.item())
loss.backward()
optimizer.step()
loss_t = sum(loss_t) / len(loss_t)
loss_v = self.evaluate(x_valid, y_valid)
print('Epoch: {} - L: {:.4f} - L_v {:.4f}'.format(epoch, loss_t, loss_v))torch_model = TorchSequential([
nn.Linear(N, 32), nn.Tanh(),
nn.Linear(32, 32), nn.Softmax(dim=1),
nn.Linear(32, 32), nn.Sigmoid(),
nn.Linear(32, 32), nn.ReLU(),
nn.Linear(32, NO)
])Scratch vs Sequential¶
scratch model¶
model = Model([
InputLayer(N),
Dense(32, Tanh()),
Dense(32, Softmax()),
Dense(32, Sigmoid()),
Dense(32, RelU()),
Dense(NO, Linear())
])evals¶
import MAPE modified¶
# This cell imports torch_mape
# if you are running this notebook locally
# or from Google Colab.
import os
import sys
module_path = os.path.abspath(os.path.join('..'))
if module_path not in sys.path:
sys.path.append(module_path)
try:
from tools.torch_metrics import torch_mape as mape
print('mape imported locally.')
except ModuleNotFoundError:
import subprocess
repo_url = 'https://raw.githubusercontent.com/PilotLeoYan/inside-deep-learning/main/content/tools/torch_metrics.py'
local_file = 'torch_metrics.py'
subprocess.run(['wget', repo_url, '-O', local_file], check=True)
try:
from torch_metrics import torch_mape as mape # type: ignore
print('mape imported from GitHub.')
except Exception as e:
print(e)mape imported locally.
predict¶
mape(
model.predict(X_valid),
torch_model(X_valid)
)24.97930723077388copy parameters¶
model.copy_parameters(torch_model.parameters)predict after copy parameters¶
mape(
model.predict(X_valid),
torch_model(X_valid)
)2.6684090010879886e-17loss¶
mape(
model.evaluate(X_valid, Y_valid),
torch_model.evaluate(X_valid, Y_valid)
)0.0train¶
LR: float = 0.01
EPOCHS: int = 32
BATCH_SIZE: int = len(Y_train) // 3torch_model.fit(
X_train, Y_train.double(),
EPOCHS, LR, BATCH_SIZE,
X_valid, Y_valid.double()
)Epoch: 0 - L: 13664.4211 - L_v 13403.6792
Epoch: 1 - L: 13498.9990 - L_v 17327.6682
Epoch: 2 - L: 14729.3822 - L_v 13391.5340
Epoch: 3 - L: 13585.3746 - L_v 13390.5902
Epoch: 4 - L: 13549.0112 - L_v 13390.6349
Epoch: 5 - L: 13514.5526 - L_v 13391.5920
Epoch: 6 - L: 13481.8992 - L_v 13393.3897
Epoch: 7 - L: 13450.9566 - L_v 13395.9607
Epoch: 8 - L: 13421.6355 - L_v 13399.2419
Epoch: 9 - L: 13393.8511 - L_v 13403.1738
Epoch: 10 - L: 13367.5232 - L_v 13407.7011
Epoch: 11 - L: 13342.5756 - L_v 13412.7714
Epoch: 12 - L: 13318.9362 - L_v 13418.3359
Epoch: 13 - L: 13296.5366 - L_v 13424.3489
Epoch: 14 - L: 13275.3119 - L_v 13430.7675
Epoch: 15 - L: 13255.2008 - L_v 13437.5515
Epoch: 16 - L: 13236.1450 - L_v 13444.6636
Epoch: 17 - L: 13218.0894 - L_v 13452.0685
Epoch: 18 - L: 13200.9816 - L_v 13459.7335
Epoch: 19 - L: 13184.7721 - L_v 13467.6280
Epoch: 20 - L: 13169.4138 - L_v 13475.7234
Epoch: 21 - L: 13154.8623 - L_v 13483.9931
Epoch: 22 - L: 13141.0753 - L_v 13492.4123
Epoch: 23 - L: 13128.0129 - L_v 13500.9579
Epoch: 24 - L: 13115.6371 - L_v 13509.6084
Epoch: 25 - L: 13103.9119 - L_v 13518.3437
Epoch: 26 - L: 13092.8034 - L_v 13527.1453
Epoch: 27 - L: 13082.2793 - L_v 13535.9961
Epoch: 28 - L: 13072.3089 - L_v 13544.8799
Epoch: 29 - L: 13062.8633 - L_v 13553.7821
Epoch: 30 - L: 13053.9149 - L_v 13562.6890
Epoch: 31 - L: 13045.4378 - L_v 13571.5880
model.fit(
X_train, Y_train,
EPOCHS, LR, BATCH_SIZE,
X_valid, Y_valid
)Epoch: 0 - L: 13664.4211 - L_v 13403.6792
Epoch: 1 - L: 13498.9990 - L_v 17327.6682
Epoch: 2 - L: 14729.3822 - L_v 13391.5340
Epoch: 3 - L: 13585.3746 - L_v 13390.5902
Epoch: 4 - L: 13549.0112 - L_v 13390.6349
Epoch: 5 - L: 13514.5526 - L_v 13391.5920
Epoch: 6 - L: 13481.8992 - L_v 13393.3897
Epoch: 7 - L: 13450.9566 - L_v 13395.9607
Epoch: 8 - L: 13421.6355 - L_v 13399.2419
Epoch: 9 - L: 13393.8511 - L_v 13403.1738
Epoch: 10 - L: 13367.5232 - L_v 13407.7011
Epoch: 11 - L: 13342.5756 - L_v 13412.7714
Epoch: 12 - L: 13318.9362 - L_v 13418.3359
Epoch: 13 - L: 13296.5366 - L_v 13424.3489
Epoch: 14 - L: 13275.3119 - L_v 13430.7675
Epoch: 15 - L: 13255.2008 - L_v 13437.5515
Epoch: 16 - L: 13236.1450 - L_v 13444.6636
Epoch: 17 - L: 13218.0894 - L_v 13452.0685
Epoch: 18 - L: 13200.9816 - L_v 13459.7335
Epoch: 19 - L: 13184.7721 - L_v 13467.6280
Epoch: 20 - L: 13169.4138 - L_v 13475.7234
Epoch: 21 - L: 13154.8623 - L_v 13483.9931
Epoch: 22 - L: 13141.0753 - L_v 13492.4123
Epoch: 23 - L: 13128.0129 - L_v 13500.9579
Epoch: 24 - L: 13115.6371 - L_v 13509.6084
Epoch: 25 - L: 13103.9119 - L_v 13518.3437
Epoch: 26 - L: 13092.8034 - L_v 13527.1453
Epoch: 27 - L: 13082.2793 - L_v 13535.9961
Epoch: 28 - L: 13072.3089 - L_v 13544.8799
Epoch: 29 - L: 13062.8633 - L_v 13553.7821
Epoch: 30 - L: 13053.9149 - L_v 13562.6890
Epoch: 31 - L: 13045.4378 - L_v 13571.5880
I know that both models are experiencing overfitting during training, but the goal of this notebook is not to create good predictors on synthetic data, but to understand their inner workings.
predict after train¶
mape(
model.predict(X_valid),
torch_model(X_valid)
)7.389416403209695e-17bias¶
filtered_layers = filter(
lambda x: isinstance(x, nn.modules.linear.Linear),
torch_model.layers
)
for i, layer in enumerate(filtered_layers):
print(f'scratch layer #{i} - torch layer #{i}')
print(mape(model.layers[i].b, layer.bias))scratch layer #0 - torch layer #0
1.100368967013642e-17
scratch layer #1 - torch layer #1
9.118273765416466e-17
scratch layer #2 - torch layer #2
1.5243841751619586e-16
scratch layer #3 - torch layer #3
2.9812021329610868e-16
scratch layer #4 - torch layer #4
7.389416403209695e-17
weights¶
filtered_layers = filter(
lambda x: isinstance(x, nn.modules.linear.Linear),
torch_model.layers
)
for i, layer in enumerate(filtered_layers):
print(f'scratch layer #{i} - torch layer #{i}')
print(mape(model.layers[i].w, layer.weight.T))scratch layer #0 - torch layer #0
2.3191500981452188e-17
scratch layer #1 - torch layer #1
8.654105548130925e-17
scratch layer #2 - torch layer #2
2.7447784005892586e-16
scratch layer #3 - torch layer #3
2.6299758459754005e-16
scratch layer #4 - torch layer #4
4.0489378209898475e-16